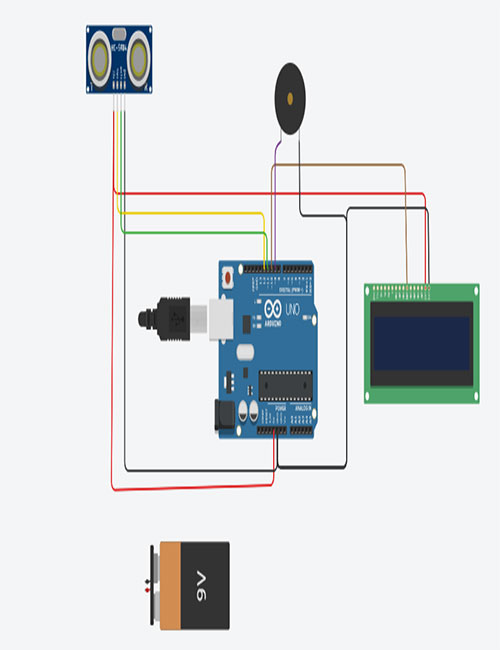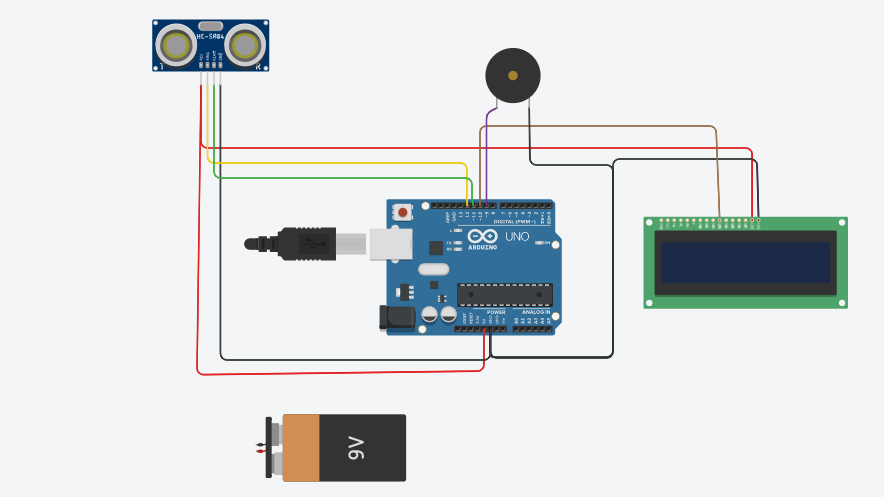
This project helps on monetoring the water level on the tank with the help of Ultrasonic Sensor. Arduino is used as a controller and LCD display is used for displaying information. For alert purpose a buzzer is used whose alert can be set in the level wanted. Notifies when there is low water level and also when the tank is about to fill fully.
Programming Language: C++
Please adjust the height of the tank in the code as the height of tank may be different as used in this project. and replace the alert level based on calculation. And the display used in this project is connected by I2C module whose diagram is not shown in circuit diagram
char t;
void setup() {
pinMode(13,OUTPUT); //left motors forward
pinMode(12,OUTPUT); //left motors reverse
pinMode(11,OUTPUT); //right motors forward
pinMode(10,OUTPUT); //right motors reverse
pinMode(9,OUTPUT); //Led
Serial.begin(9600);
}
//@roshansutihar
void loop() {
if(Serial.available()){
t = Serial.read();
Serial.println(t);
}
if(t == 'F'){ //move forward(all motors rotate in forward direction)
digitalWrite(13,HIGH);
digitalWrite(11,HIGH);
}
else if(t == 'B'){ //move reverse (all motors rotate in reverse direction)
digitalWrite(12,HIGH);
digitalWrite(10,HIGH);
}
else if(t == 'L'){ //turn right (left side motors rotate in forward direction, right side motors doesn't rotate)
digitalWrite(11,HIGH);
}
//@roshansutihar
else if(t == 'R'){ //turn left (right side motors rotate in forward direction, left side motors doesn't rotate)
digitalWrite(13,HIGH);
}
else if(t == 'W'){ //turn led on or off)
digitalWrite(9,HIGH);
}
else if(t == 'w'){
digitalWrite(9,LOW);
}
//@roshansutihar
else if(t == 'S'){ //STOP (all motors stop)
digitalWrite(13,LOW);
digitalWrite(12,LOW);
digitalWrite(11,LOW);
digitalWrite(10,LOW);
}
delay(100);
}